中國科學院自動化研究所牽頭的聯合研究團隊,通過記錄獼猴執行自然抓取任務時的神經活動,發現在大腦的運動皮層中存在類似GPS的神經編碼機制,能夠在抓取過程中實時表征手在空間中的位置。這為理解大腦如何控制運動提供了全新視角,并為腦機接口的設計和機器人運動控制帶來了重要啟發。
人類以及獼猴等靈長類動物的手臂可以靈巧地執行各種抓取任務。大腦如何規劃和執行這些任務是神經科學的核心問題之一。此前的研究表明,大腦海馬體中的“位置細胞”能夠為身體導航提供空間信息,幫助動物構建認知地圖。然而,手等身體部位的運動是否存在類似的導航框架是未解之謎。
該研究通過在4只獼猴的大腦背側前運動皮層植入微電極陣列,記錄它們在自然抓取任務中的神經活動,并通過多個攝像頭記錄獼猴手部的運動軌跡,分析了大腦背側前運動皮層神經元在抓取任務中的活動模式。
研究顯示,約22%的大腦背側前運動皮層神經元在手部處于特定空間位置時活動增強,形成“位置野”。這些神經元能夠實時、高效地表征運動中的手位置,僅使用50個最活躍的位置神經元,就能以80%的準確率解碼手部運動軌跡。這表明,手位置信息在大腦背側前運動皮層中以“位置野”編碼的形式存在,類似于海馬體中用于導航的位置細胞。
進一步,研究發現,手位置信息與手的運動方向、速度和抓取目標的位置等信息在同一個大腦背側前運動皮層神經元群體中共同編碼。這種混合編碼方式使得大腦能夠同時考慮空間信息和運動信息,從而實現了高效的運動規劃和執行。這一混合編碼方式正是海馬體在空間導航任務采用的方式,提示大腦利用相似的神經計算框架實現不同尺度上的空間導航。
上述研究為腦機接口和機器人的發展提供了新思路。通過解碼這些位置神經元的活動,有望實現更精準高效的神經假肢控制,同時可以基于大腦的運動導航原理來設計更加靈巧的機械臂控制算法。
近日,相關成果發表在《自然-通訊》(Nature Communications)上。該研究由自動化所、解放軍第九醫學中心、吉林大學第一醫院等合作完成。
論文鏈接
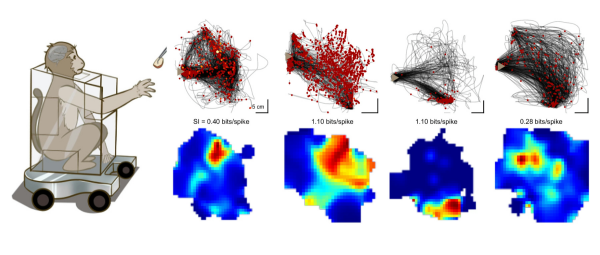
獼猴自然抓取范式以及大腦背側前運動皮層神經元的“位置野”活動模式
