電壓調(diào)速模式(帶V驅(qū)動器)驅(qū)動器處于持續(xù)自運行模式,驅(qū)動器無需通過信號源(PLC,控制板等)發(fā)送脈沖����,也無須給信號端輸入開關信號����,驅(qū)動器即可控制步進電機做單一方向運動���。速度可以通過撥碼開關設定��。

常規(guī)調(diào)速模式驅(qū)動器
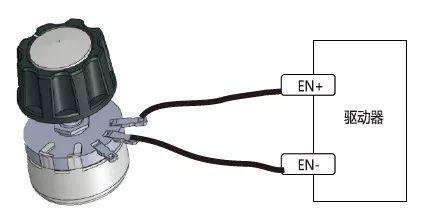
持續(xù)自運行模式下���,通過撥碼開關設定電機最高速度�����,可根據(jù)客戶需求定制。通過外接電位器可調(diào)節(jié),通過撥碼設定的最高速度至0轉(zhuǎn)/分之間任意速度��。電位器阻值越高�,速度越接近最高速度。
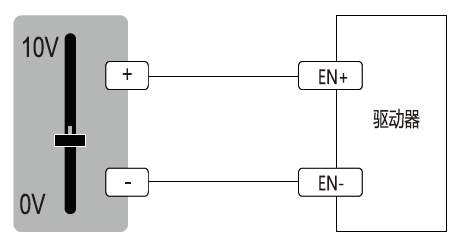
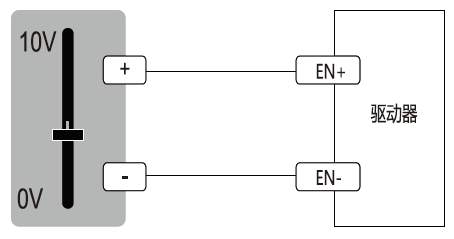
持續(xù)自運行模式下,通過撥碼開關設定電機最高速度��,可根據(jù)需求定制���。用戶可改變輸入電壓來調(diào)節(jié)撥碼設定的最高速度至0轉(zhuǎn)/分之間任意速度��。電壓越接近10V��,速度越接近最高速度。電壓為0時����,速度為0���。注意最高輸入電壓不得超過10.5Vdc��。
帶方向調(diào)速模式驅(qū)動器
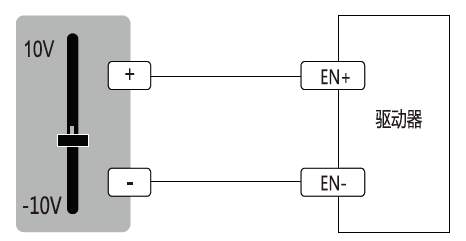
根據(jù)電壓特點����,實現(xiàn)電機正反轉(zhuǎn)����,持續(xù)自運行模式下���,通過撥碼開關設定電機最高速度��。用戶可改變輸入電壓來調(diào)節(jié)速度和方向�,撥碼設定最高速度至最低速度����。
1.電壓接近10V,速度接近正向最高速度,電壓為0�����,速度為0�����。2.電壓接近-10V��,速度接近反向最高速度,電壓為0����,速度為0
根據(jù)電壓特點���,實現(xiàn)電機正反轉(zhuǎn)����,持續(xù)自運行模式下�����,通過撥碼開關設定電機最高速度。用戶可改變輸入電壓來調(diào)節(jié)速度和方向�,撥碼設定最高速度至最低速度����。
1.電壓為5V�,速度為0。電壓為0V或懸空時���,速度接近正向最高速度。2.電壓接近10V�����,速度接近反向最高速度��,電壓為5V時�����,速度為0
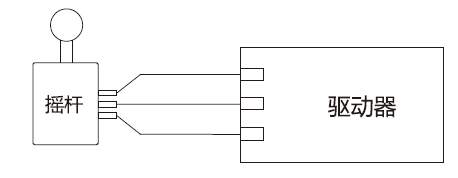
搖桿調(diào)速
利用搖桿的電阻分壓特性,精準識別搖桿的角位大小變化����,實現(xiàn)電機正反轉(zhuǎn)和調(diào)速���。持續(xù)自運行模式下��,通過撥碼開關設定電機運行速度,可定制。
1.搖桿位置在中間 電機停止運動�;2.搖桿位置偏移�,電機方向和速度同時變化��,變動角位越大速度越接近撥碼設定最高值��。